Consider a shaft AB carrying a uniformly distributed load of 'w' per unit length as shown in Fig.,

Let y1 = Static deflection at the middle of the shaft,
a1 = Amplitude of vibration at the middle of the shaft, and
w1 = Uniformly distributed load per unit static deflection at the middle of the shaft = w/y1 .
Now consider a small section of the shaft at a distance 'x' from A and length 'δ x'.
Let y = Static deflection at a distance 'x' from A, and length 'δ x'.
a = Amplitude of its vibration.
∴ Work done on this small section

Since the maximum potential energy at the extreme position is equal to the amount of work done to move the beam from the mean position to one of its extreme position therefore
Maximum potential energy at the extreme position

Assuming that the shape of the curve of a vibrating shaft is similar to the static deflection curve of a beam, therefore

Substituting those values in equation (i), we have maximum potential energy at the extreme position

Since the maximum velocity at the mean position is 'ω.a1', where 'ω' is the circular frequency of vibration, therefore
Maximum kinetic energy at the mean position

We know that the maximum potential energy at the extreme position is equal to the maximum kinetic energy at the mean position, therefore equating equations (ii) and (iii),

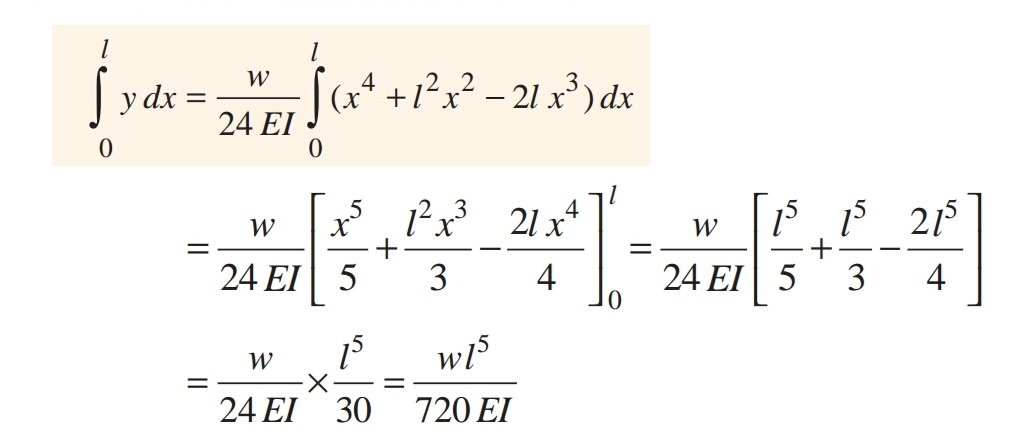
When the shaft is simply supported, then the static deflection at a distance 'x' from A is

Where W = Uniformly distributed load per unit length,
E = Young's modulus or the material o the shaft, and
I = Moment o inertia of the shaft.
Now integrating the above equation (v) within the limits 0 to l,

Substituting the value in equation (iv) from equation (vi) and (vii), we get circular frequency due to uniformly distributed load,

∴ Natural frequency due to uniformly distributed load,

We know that the static defection of a simply supported shaft due to uniformly distributed load of 'w' per unit length, is

Equation (ix) may be written as,