In deriving the expressions for natural frequency of longitudinal and transverse vibrations, we have neglected the inertia of the constraint i.e. shaft. We shall now discuss the effect of the inertia of the constraint, as below:
1. Longitudinal vibration
Consider the constraint whose one end is fixed and other end is free as shown in Fig.
Let m1 = Mass of the constraint per unit length,
l = Length of the constraint,
mC = Total mass of the constraint = m1. l, and
v = Longitudinal velocity of the free end.
Consider a small element of the constraint at a distance x from the fixed end and of length δx.
∴ Velocity of the small element
If a mass of mC/3 is placed at the free end and the constraint is assumed to be negligible mass, then
Total kinetic energy possesed by the constraint
Hence the two systems are dynamically same. Therefore, inertia of the constraint may be allowed for by ading one-third of its mass to the disc at the free end.
From the above discussion, we find that when the mass of the constraint mC and the mass of the dosc 'm' at the end is given, then natural frequency of vibration,
2. Transverse vibration
Consider a constraint whose one end is fixed and the other end is free as shown in Fig..
Let m1 = Mass of the constraint per unit length,
l = Length of the constraint,
mC = Total mass of the constraint = m1. l, and
v = Longitudinal velocity of the free end.
Consider a small element of the constraint at a distance x from the fixed end and of length δx . The velocity of this element is given by
If a mass of 33mC/140 is placed at the free end and the constraint is assumed to be negligible mass, then
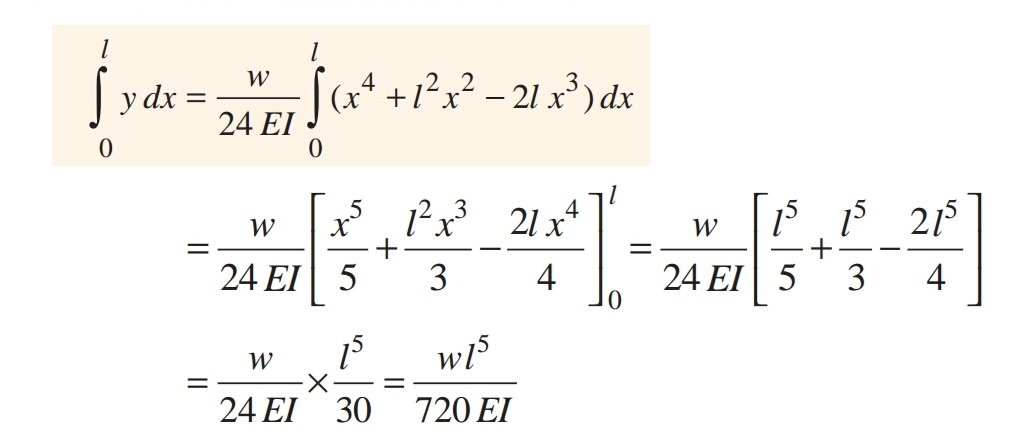
Total kinetic energy possesed by the constraint
Hence the two systems are dynamically same. Therefore, inertia of the constraint may be allowed for by adding 33/140 of its mass to the disc at the free end.
From the above discussion, we find that when the mass of the constraint mC and the mass of the dosc 'm' at the end is given, then natural frequency of vibration,
Notes:
1. If both the ends of the constraint are fixed, and the disc is situated in the middle of it, then proceeding in the similar way as discussed above, we may prove that the inertia of the constraint may be allowed for by adding 13/35 of its mass to the disc.
2. If the constraint is like a simply supported beam, then 17/35 of its mass may be added to the mass of the disc.